

مجموعاتنا البحثية
الخلفية والهدف:
تلعب الروبوتات رباعية الأرجل دورًا حاسمًا في تطبيقات البحث والإنقاذ والتطبيقات العسكرية، حيث توفر إمكانية التنقل المعززة عبر التضاريس المتنوعة. يهدف هذا المشروع إلى تكرار بيانات حركة الكلاب على الأسطح الزلقة باستخدام روبوت لايكاغو. ومن خلال الاستفادة من برنامج DeepLabCut لتتبع الحركة والتعلم المعزز للحركة التكيفية، نسعى إلى تعزيز ثبات الروبوت وأدائه في البيئات الصعبة.
مجموعة حركة الروبوت رباعي الأرجل (QRL)

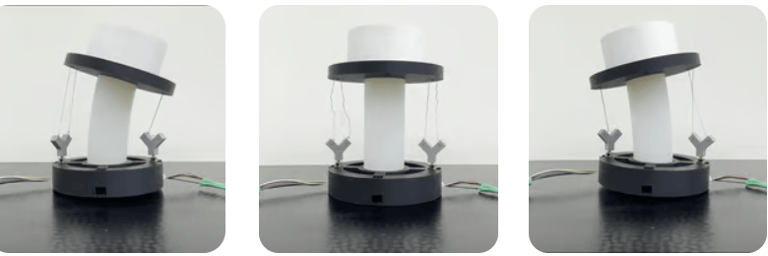
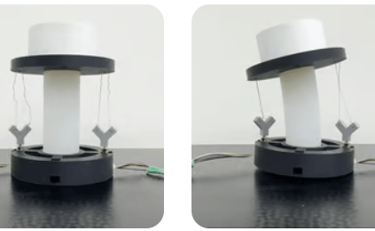
مجموعة مشغل الخيوط المتشابكة (ISA)
الهدف:
تطوير مشغل مبتكر يستفيد من مبادئ الالتواء واللف لرفع الأحمال المستهدفة بكفاءة. صُمم هذا المشغّل من أجل الحد الأدنى من استهلاك الطاقة والبنية خفيفة الوزن، مما يعزز الأداء مع تقليل الوزن الكلي للنظام، مما يجعله مثاليًا للتطبيقات المتقدمة في مجال الروبوتات والأتمتة.



مجموعة (RBE)
الهدف:
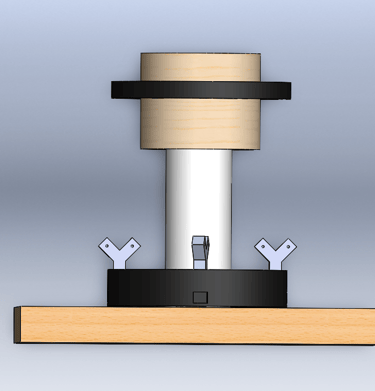
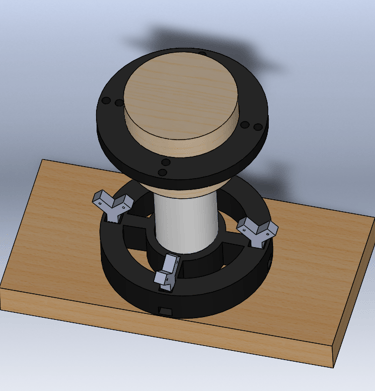
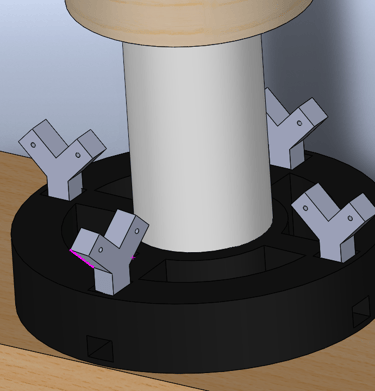
في مجموعة RBE Group، نقوم بتصميم وتصنيع مشغلات كهرومغناطيسية متطورة تولد إزاحة خطية باستهلاك منخفض للطاقة. تتميز مشغلاتنا بملف مركزي ومغناطيسات دائمة جانبية مزدوجة و محاطة بمادة السيليكون المطاطي ، وهي مصممة لتحقيق الكفاءة والموثوقية وتعدد الاستخدامات في مختلف التطبيقات.

مجموعة (SHEMPV)



الهدف:
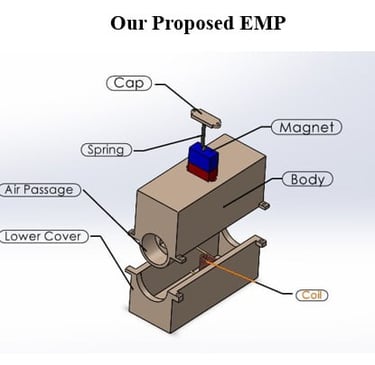
نهدف إلى تطوير صمام هوائي مغناطيسي يعالج المشاكل الموجودة في الصمامات الهوائية الميكانيكية ومنها كبر الحجم والاستهلاك العالي للطاقة. وقمنا بتصميم وتصنيع soft hand لدراسة كفاءة الصمام المقترح.
مجموعة قياس مستوى الجلوكوز (GLM)
الهدف:
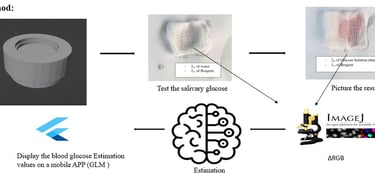
الهدف من هذا المشروع هو تطوير طريقة غير جراحية لقياس مستويات السكر في الدم لدى مرضى السكري باستخدام اللعاب كبديل لتقنيات أخذ عينات الدم التقليدية.يهدف هذا النهج إلى جعل مراقبة نسبة السكر في الدم أكثر سهولة وراحة وأقل إجهادًا للأفراد المصابين بداء السكري، مع ضمان الدقة والموثوقية في تتبع مستويات الجلوكوز.

مجموعة (LP)
الهدف:
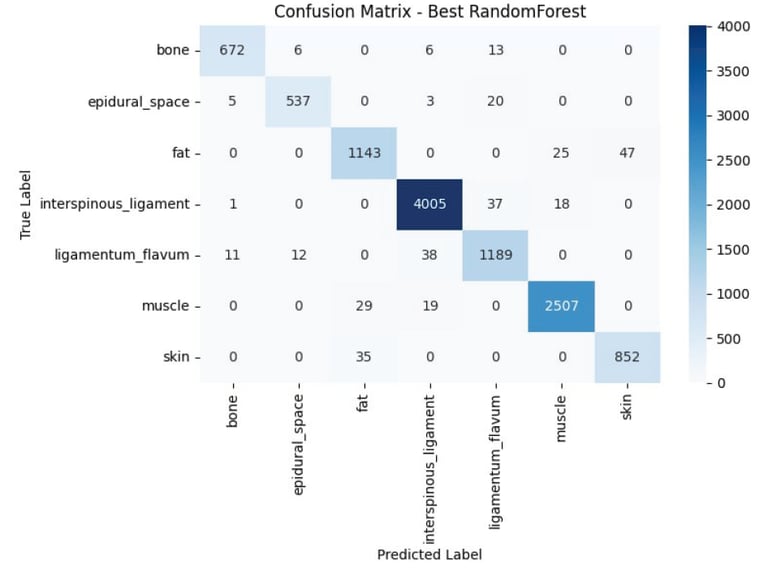
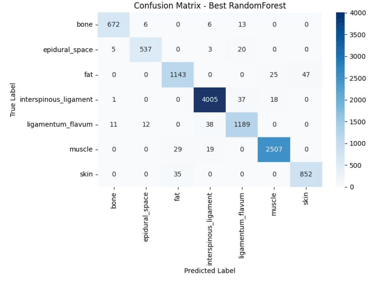
تهدف هذه المجموعة إلى تطوير نظام روبوتي للبزل القطني يدمج بين قياس القوة وتصنيف الأنسجة القائم على التعلم الآلي. ويستخدم النظام خلية تحميل لقياس قوة إدخال الإبرة ونموذج SVM لتصنيف طبقات الأنسجة (الجلد والدهون والعضلات والأربطة) بناءً على بيانات إلازاحة و القوة. الهدف هو تعزيز الدقة وتقليل المضاعفات وتحسين سلامة وفعالية الإجراء.


مجموعة (MAGCAT)
الهدف:
تهدف مجموعة MAGCAT (القسطرة الروبوتية المحركة مغناطيسيًا) إلى تطوير نظام قسطرة روبوتي ناعم ومرن يعتمد على المجالات المغناطيسية الخارجية للتوجيه والحركة داخل الجسم بشكل دقيق وآمن وبدون الحاجة إلى مكونات ميكانيكية صلبة. يسعى هذا النظام إلى تقليل الأذى الجراحي، وتعزيز التحكم أثناء الإجراءات التدخلية، وتوفير حل منخفض التكلفة يمكن استخدامه في المستشفيات والعيادات في البيئات محدودة الموارد. تركز المجموعة على تحسين كفاءة التحريك المغناطيسي، وسرعة استجابة النظام، وإمكانية تطبيقه في العمليات الجراحية الواقعية مستقبلاً.








مجموعة (PB)
الهدف:
نُركز على تنفيذ روبوت سائل مزود بجزيئات مُعدّلة كيميائيًا لتوصيل الأدوية بشكل موجّه في علاج أورام المثانة. من خلال الاستفادة من قوى الإشعاع فوق الصوتي، نهدف إلى توجيه الروبوت الحامل للدواء بدقة نحو مواقع الأورام، مما يُعزز من كفاءة العلاج ويُقلل من الآثار الجانبية الجهازية واحتمالية تكرار المرض


