

OUR Research Groups
Background & Objective:
Quadruped robots play a crucial role in search, rescue, and military applications, offering enhanced mobility across diverse terrains. This project aims to replicate Dogs motion data on slippery surfaces using the Laikago robot. By leveraging DeepLabCut for motion tracking and reinforcement learning for adaptive locomotion, we seek to enhance the robot's stability and performance in challenging environments.
Quadruped Robot Locomotion Group (QRL)

Intertwined string actuator Group (ISA)
Objective:
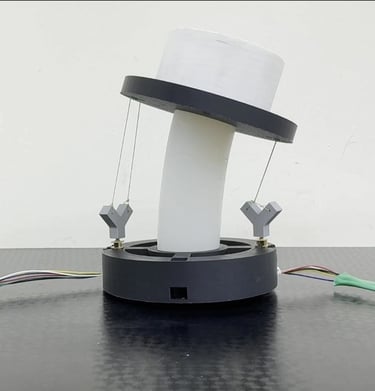
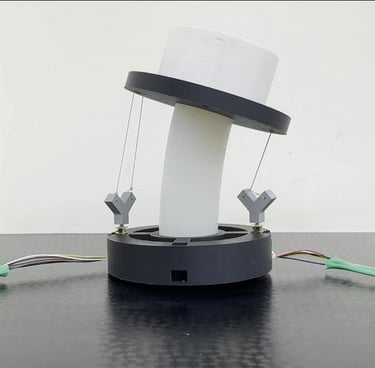
Developing a novel actuator leveraging twisting and coiling mechanisms to achieve efficient weight lifting. This actuator is designed for minimal energy consumption, lightweight construction, and enhanced performance, reducing the overall system weight while maintaining high efficiency.



RBE Group
Objective:
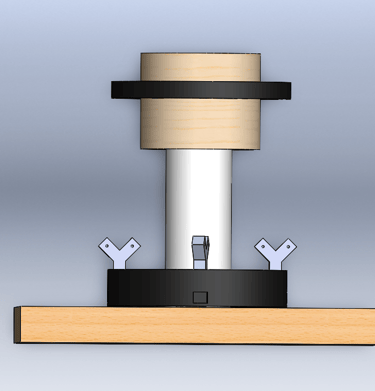
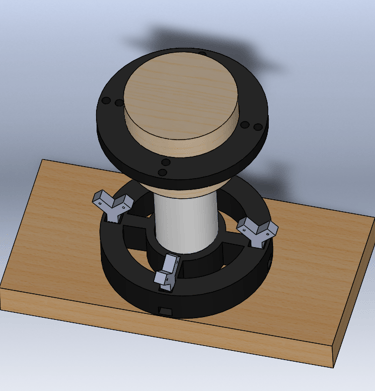
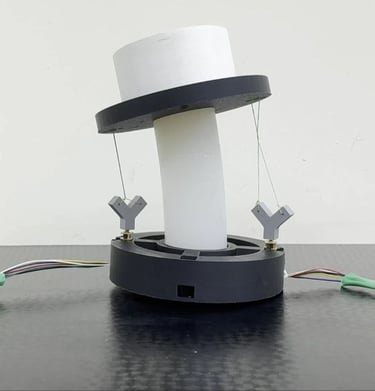
At RBE Group, we design and manufacture advanced soft electromagnetic actuators that generate linear displacement with low power consumption. Featuring a central coil, dual side permanent magnets, and a silicone rubber enclosure, our actuators are engineered for efficiency, reliability, and versatility across various applications.

Soft Hand Electro Magnet Pneumatic Valve Group (SHEMPV)
Objective:
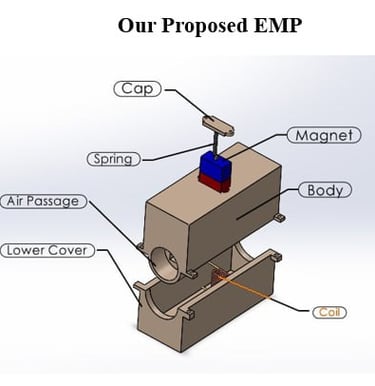
We aim to develop a soft hand actuated using an electro-permanent magnet valve, addressing limitations in current valve designs such as bulkiness and high energy consumption.

Glucose Level Measurement Group (GLM)
Objective:
The objective of this project is to develop a non-invasive method for measuring blood sugar levels in people with diabetes by using saliva as an alternative to traditional blood sampling techniques. This approach aims to make blood sugar monitoring more accessible, comfortable, and less stressful for individuals with diabetes, while ensuring accuracy and reliability in tracking glucose levels.


Lumbar Puncture Group (LP)
Objective:
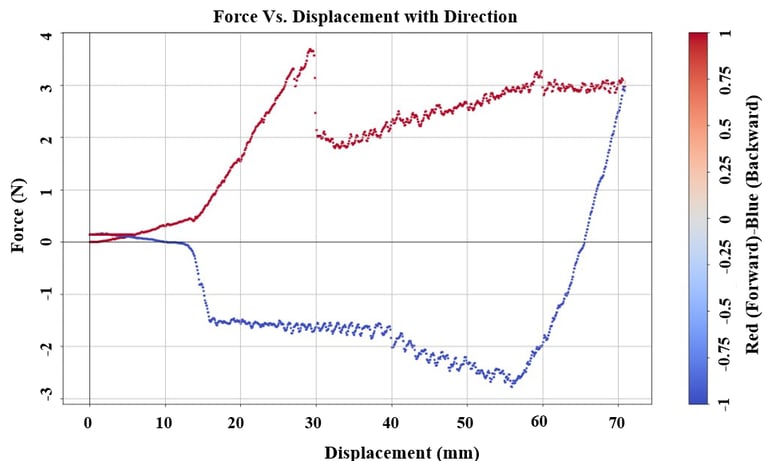
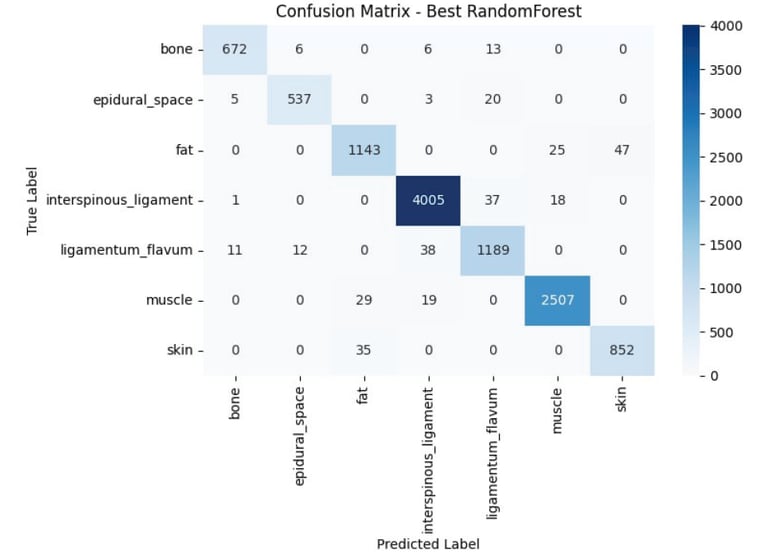
This group aims to develop a robotic system for lumbar puncture that integrates force measurement and machine learning-based tissue classification. The system utilizes a load cell to measure needle insertion force and an SVM model to classify tissue layers (skin, fat, muscle, and ligament) based on force-displacement data. The goal is to enhance precision, reduce complications, and improve the safety and effectiveness of the procedure.



MAGCAT Group
Objective:
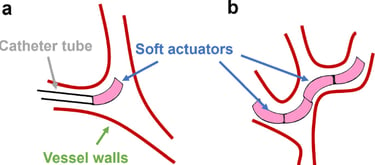
The MAGCAT Group is dedicated to developing a soft robotic catheter system that enables minimally invasive navigation using external magnetic fields. The objective is to design a controllable, flexible catheter capable of performing safe and precise movements inside the body without the need for rigid mechanical components. This approach aims to reduce surgical trauma, enhance control during interventional procedures, and provide an accessible solution for hospitals and clinics, particularly in resource-limited environments.








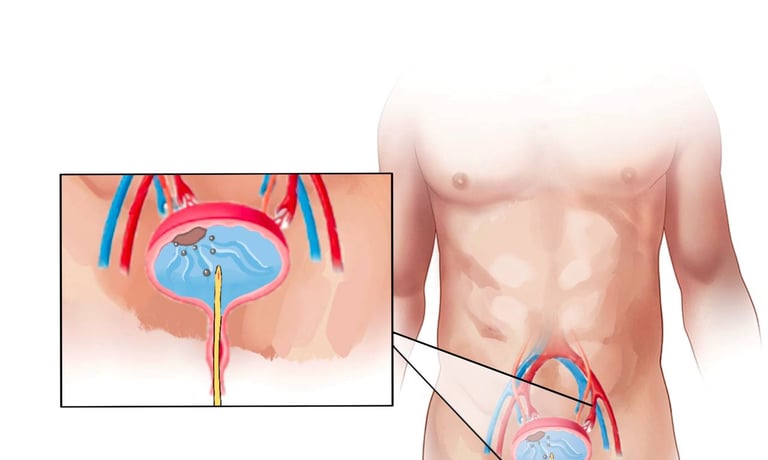
PB Group
Objective:
We focus on the implementation of a chemically refined particle-armored liquid robot for targeted drug delivery in the treatment of non-muscle-invasive bladder tumors. By harnessing ultrasonic radiation forces, we aim to precisely guide the bot carrying drug to tumor sites, enhancing treatment efficiency while minimizing systemic side effects and recurrence.